


¿Estás interesado en construir un robot de competencia? ¿Sabes cual es la mejor forma de hacerlo?
El Ingeniero Miguel A. Piedra Ángeles, de la Asociación Mexicana de Mecatrónica, explicó en su workshop, “Diseño de algoritmos para robots de competencia”, consejos acerca de las distintas partes a enfocarse en tu robot sumo cuando asistas a una competencia. Aquí te los mencionamos y explicamos.
Hardware
“La programación se hace pensando en que la computadora va a funcionar, entonces el hardware debe estar en buenas condiciones”, aquí se considera al diseño electrónico y mecánico.

Peso:
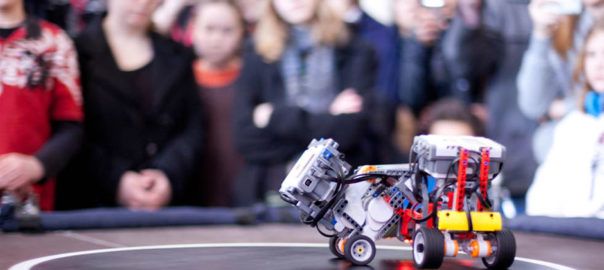
El peso juega una clave importante en ganar este tipo de concursos que consisten en empujar al robot rival de la arena circular, es por eso que si nuestro robot es muy pesado consumirá más energía de la que debería y no tendrá la fuerza necesaria para poder empujar al rival (vaya ni si quiera la necesaria para moverse) así que las consideraciones a tener en cuenta son:
- No es recomendable el uso de protoboards en tu robot ya que ademas de no ser nada profesional, hace al robot muy pesado.
- Las cuchillas flexibles son mejores que las fijas, ya que ayudan a usar el peso del rival a nuestro favor cuando este coloque sus cuchillas en nuestro robot.
- La batería debe colocarse en un lugar adecuado ya que esta, por su peso, puede desbalancear a nuestro robot.
- Cambiar el grosor de nuestra tarjeta cambia mucho el peso.
Motor:
Una de las cosas mas importantes de nuestro robot. Sin este nuestro robot no se movería, es por eso que hay que tener ciertas consideraciones, por ejemplo, el motor más usado para este tipo de robots es el TBGGR que suele consumir 600mA en movimiento y 1600mA en paro (sí, en paro se consume más ya que necesitara arrancar) algunas otras consideraciones a tener en cuenta son:
- Cuando se daña el embobinado consume más corriente, hablando de este motor, en movimiento el motor consume 2A y en paro consume hasta 6A, lo cual provoca muchas veces que se queme.
- El driver de los motores debe soportar por lo menos el 200% de la corriente de paro (Un driver es un circuito al cual se conecta circuitos digitales para evitar daños).
Consideraciones generales de hardware:
- “El micro-controlador siempre sera tan bueno como la persona que lo programa”.
- Se debe implementar desde el inicio un método de diagnostico para facilitar las reparaciones y el debuggeo (diagnostico para reparación de errores) del robot, es decir, alguna pista en especifico para leer el voltaje de entrada, otra para el voltaje de salida, etc.
- El sistema debe estar protegido contra cortocircuitos e inversión de polaridad.
- Las partes del robot deben ser de primera calidad.
- Siempre practicar la soldadura, y armado en otro lado.
- Se debe conocer la velocidad de actualización de los sensores usados así como sus limitantes y restricciones.
Rendimiento:
Considerar la capacidad de respuesta y procesamiento del sistema de control
- Se pueden reducir el uso de los sensores multiplexandolos, es decir, solo utilizar ciertos sensores cuando se encuentran a cierta distancia de la linea de la arena, e ir cambiando entre ellos, eso le reduce bastante la carga al microprocesador.
- Se puede programar en un lenguaje de bajo nivel o cercano a este, ya que los lenguajes de alto nivel tienen muchas consideraciones respecto a las revisiones que realizan en su respectivo compilador lo cual pueden alentar la velocidad de la ejecución del código.
- La parte que se encarga de arrancar el motor debe estar conectado de forma directa con la batería es decir (positivo a positivo y negativo a negativo, ya que esta es la parte que funciona más potente), así pues, la reversa debe de estar de forma inversa.
Llantas:
Las llantas son sumamente importantes ya que estas nos pueden proporcionar más fuerza o más velocidad y esto impacta directamente en el firmware, ya que por ejemplo si tenemos llantas de mucha velocidad pero atacamos solo de frente, nuestro robot sera violentamente aniquilado por el rival, o si nuestras llantas son de fuerza, pero atacamos de lado, nuestro robot puede perder el control y salir disparado fuera del anillo blanco de la arena.
Las mas comunes:
- 50:1 reducen la velocidad 50 veces pero incrementan la fuerza a 50 veces.
- 10:1 reducen la fuerza 50 veces pero incrementan la velocidad 50 veces.
Miscelaneo
Utilizar estrategias para ganarle más fácil al rival, por ejemplo utilizar terciopelo al robot para evitar ser detectado por los sensores infrarrojos del contrario ( que suelen ser los mas utilizados), utilizar imanes para tener tanto mas fuerza de empuje como de agarre y cualquier estrategia que pueda confundir la programación del contrario o su mecánica puede funcionar.
Firmware

El cerebro del robot, su razonamiento lógico es a lo que recurre para saber que hacer dependiendo la situación en la que se encuentre tanto el como su rival (la programación).
- El diseño debe permitir que el algoritmo se ejecute de manera correcta, es decir, si por ejemplo se están utilizando sensores que requieren cierta luz para leer información y se programa no considerando esto, no se va a lograr la ejecución correcta del programa del robot.
- Si se utilizan librerías creadas por otras personas se debe comprobar su correcto funcionamiento para evitar funcionamientos no deseados.
Factor Humano
De lo más importante según el Ing. ya que una buena programación y diseño de hardware, así como algún cambio del firmware ya cercano en la competencia puede hacer el cambio entre ganar o perder, explico que es 90% factor humano, 10% robot.


